
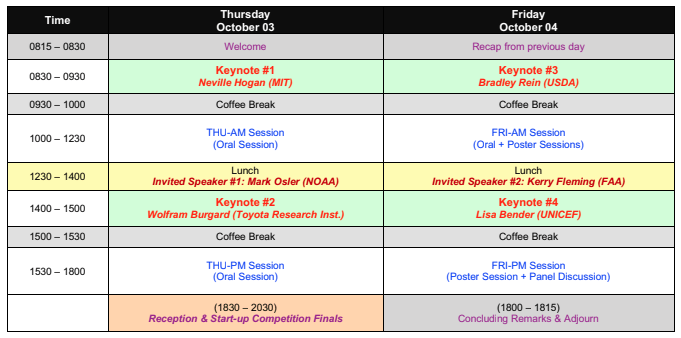
Program at a glance
Download Oral Presentations and Poster Sessions Program
Technical Program
Session: THU-AM1 Medical & Rehabilitation Robotics 1000-1130
Session Co-Chairs: Prithviraj Dasgupta & Anindo Roy
- Prithviraj Dasgupta, Anoop Mishra, Carl Nelson and Judith Bumfield, Towards Intelligent Semi-Autonomous Control of a Modular Robot for Human Mobility Assistance
- Lidia Al-Zogbi, Anirudh Topiwala, Thorsten Fleiter and Axel Kriger, Deep Learning Techniques for Abdominal Skin and Wound Segmentation
- Ashwin Goyal, Ruben Acevedo, and Anindo Roy, Investigating the Benefits of Force Feedback on an Ankle Robot for Rehabilitation of Foot Drop After Stroke
- Anderson Camp, Edward Chapman, and Paola Jaramillo, Control of Fluidic Artificial Muscles for Rehabilitation Exoskeleton
- Zhenyu Lin, Charles Meehan, and John Baras, Statistics-Based Slippage Correction with a Dexterous Robotic Hand
- Michael Kam, Hamed Saeidi, Ori Perl, David King and Axel Krieger, An Autonomous Robotic System for Damage Control Surgery
Session: THU-AM2 Robotics & Emerging Technologies: Ethics, Regulations, and Policy Issues 1130-1230
Session Co-Chairs: Mumu Xu & Raj Madhavan
- Huan Xu and Joseph Borson, The Future of Legal and Ethical Regulations for Autonomous Robotics
- Sheryl Gross-Glasser, Automated Vehicles: Ensuring Improvements for Currently Transportation-Challenged Populations
- David Tomblin, Leah Kaplan, John Nelson, and Mahmud Farooque, “Our Driverless Future,” Informing Autonomous Vehicle Systems Design Through Participatory Technology Assessment
- Robin Murphy, Ethics in Disaster Robotics
Session: THU-PM1 Assistive Robotics 1530-1700
Session Co-Chairs: Axel Krieger & Francisco Cuellar
- Ariel Slepyan, Rupsa Acharya, Andrei Silva, Deepesh Kumar, and Nitish Thakor, A Biomimetic Soft Finger for Palpation Applications
- Bart Paulhamus, Edward Staley, Corban Rivera, Kapil Katyal and Chien-Ming Huang, Amplified Control for Robotic Teleportation
- Louis Dankovich and Sarah Bergbreiter, CapSense: A Low Cost Wearable Gesture Recognition Technology
- Kapil Katyal, I-Jeng Wang, Gregory Hager and Chien-Ming Huang, Intent-Aware Human Motion Prediction Using Deep Generative Neural Networks
- Javier Alfredo Hilario Poma, Jose Guillemo Balbuena Galvan, Christian Penaloza, David Hernandez Carmona, Diego Quiroz, Jorge Ramirez and Francisco Cuéllar, Development of a Mobile Robot for Inspections of Analog Gauges in Industrial Plants
- Jiawei Ge, Hamed Saeidi, Justin Opfermann, Arjun Joshi and Axel Krieger, Landmark-guided Deformable Image Registration for Supervised Autonomous Robotic Tumor Resection
Session: THU-PM2 Robotics Education & Learning 1700-1800
Session Co-Chairs: Jonathan Kelly & Ashwin Ashok
- Ashwin Ashok, Creating a Pipeline for Women in Engineering and Computing Through Girls Robotics Initiatives
- Nisha Pillai, Francis Ferraro and Cynthia Matuszek, The Need for Interactive Learning by Robots in Human-Centric Environments
- James Tangorra, Joseph Hughes and Mira Olson, Peace Engineering: Engineering for Communities Affected by Conflict
- Jonathan Kelly, Htoo Htet and Joao Dutra, Leveraging Robotics Education to Improve Prosperity in Developing Nations: An Early Case Study in Myanmar
Session: FRI-AM1 Robotics for Environmental Assessment & Sustainability 1000-1130
Session Co-Chairs: Miao Yu & Jason Gregory
- Jason Gregory, S. Al-Hussain and SK Gupta, Human-Robot Teaming for Safe, Resilient Operations in Humanitarian Applications
- Bjorn Lutjens, Lucas Liebenwein and Katharina Kramer, Using Machine Learning for Forest Inventory Assessment to Increase Transparency in Reforestation
- Miao Yu, Jose-Luis Izursa, Ivan Penskiy, William Washburn and Diego Santaella, Urban Food Production Based Robot-Assisted Vertical Hydroponic Systems
- Nathan Melenbrink and Justin Werfel, Autonomous Robots for Sustainable Land Management
- Anousheh Gholami, Usman A. Fiaz and John S. Baras, Drone-Assisted Communications for Remote Areas and Disaster Relief
- Katherine Glasheen and Eric Frew, Improving Understanding and Forecasting of Tornado Formation Using Networked Small UAS
Poster Presentations
Session: FRI-AM2 1130-1230
- Ramya Kanalapuli Rajasekaran and Eric Frew, Co-operative Estimation Architecture for Target Tracking Using Small Unmanned Aircraft Systems
- Kamakshi Jain and Ian Moss, The UMD Micro Air Vehicle Team
- Caroline Kery, Cynthia Matuszek and Francis Ferraro, Cross-Language Learning of Visuolinguistic Concepts for Robot Assistants Serving Non-English Users
- Yanting Liu and Juan Rojas, Evaluation of ROOT Robot System and Curriculum to Improve Computational Thinking in Young Children
- Craig Carignan, Tuvia Rappaport and Daniil Gribook, Exoskeleton Telepresence for Robots Performing In-Space Assembly and Servicing
- Yuijiong Liu and Pinhas Ben-Tzvi, Maneuvering and Stabilization of Reduced Complexity Legged Robots Using Bio-Inspired Robotics Tails
- Patrick Fox, The UMD Kite Energy Project
- Gil Blankenship and Katrina Gramzinski, Sparkfy: An Autonomous In-Home Assistive Care Robot
- Nikhil Nair, Standardized TCP-IP Protocol for Improved Networking Between Unmanned Aerial Vehicles in City Protection Methods
Session: FRI-PM1 1530-1630
- Huan Xu and Joseph Borson, Regulatory Approaches for Learning – Enabled Components in Cyberphysical Systems
- Harnaik Dhami, Tainshu Xu, Qian Zhu, Song Li and Pratap Tokekar, Crop Height Estimation with LIDAR Equipped Robots
- John Winder, Stephanie Milani, Mathew Landen, Erebus Oh, Shane Parr, Shawn Squire, Marie desJardins and Cynthia Matuszek, Planning with Abstract, Learned Models
- Andrew Mills and Eric Frew, Rapid Frontier View Sampling in Unexplored Environments
- Yuxiang Gao and Chien-Ming Huang, Robot Programming by Situated Illustration
- Fatemeh Alimardani and John S. Baras, A Comparison of System Optimum Equilibrium Traffic Assignment Using the Concave Form of the Fundamental Diagram
- Lasitha Weerakoon and Nikhil Chopra, Bilateral Teleoperation of Soft Robots
- Ahmed Ramadan, Anindo roy and Elisabeth Smela, A Wearable Pressure Sensor Recognizes Hemiparetic Ankle Defects
- Behzad Sadrfaridpour, Kanishla Ganguly, Cornelia Fermuller and Yiannis Aloimonos, An Introduction to Computational Tactile Flow